Specificaties
| Product |
| Gewicht |
24 g |
| Motor |
| DC-motoren tot |
480 W |
| EC-motoren tot |
480 W |
| Sensor |
| Geen sensor (DC-motoren) |
Ja |
| Digitale incrementele encoder (2-kanaals, single-ended) |
Ja |
| Digitale incrementele encoder (2-kanaals, differentiaal) |
Ja |
| Digitale incrementele encoder (3-kanaals, differentiaal) |
Ja |
| Digitale Hall-sensoren (EC-motoren) |
Ja |
| SSI absoluut-encoder |
Ja |
| Regelvariabelen |
| Stroomregeling |
ja (koppel) |
| Toerentalregeling |
Ja |
| Positieregelaar |
Ja |
| Elektrische gegevens |
| Bedrijfsspanning Vcc (min.) |
12 V |
| Bedrijfsspanning Vcc (max.) |
60 V |
| Logic supply Vc (min.) |
10 V |
| Logic supply Vc (max.) |
60 V |
| Max. uitgangsspanning (factor * Vcc) |
0.9 |
| Max. uitgangsstroom Imax |
24 A |
| Max. duur van de max. uitgangsstroom Imax |
10 s |
| Uitgangsstroom continu Icont |
8 A |
| PWM-signaal van de eindtrap |
50 kHz |
| Frequentie PI-stroomregelaar |
25 kHz |
| Frequentie PI-toerentalregelaar |
2.5 kHz |
| Frequentie PID-positieregelaar |
2.5 kHz |
| Max. rendement |
98 % |
| Max. toerental (DC) |
100000 rpm |
| Max. toerental (EC, 1 poolpaar) blokcommutatie |
100000 rpm |
| Max. toerental (EC, 1 poolpaar) sinuscommutatie |
50000 rpm |
| Ingangen |
| Hall-sensorsignalen |
H1, H2, H3 |
| Encoder-signalen |
A, A\, B, B\, I, I\ |
| Max. ingangsfrequentie encoder |
6.2 MHz |
| Sensorsignalen |
Clock, Clock\, Data, Data\ |
| Digitale ingangen |
5 |
| Functies van de digitale ingangen |
limit switch, reference switch, general purpose, touch probe |
| Analoge ingangen |
2 |
| Resolutie, bereik, schakeling |
12-bit, -10…+10V, differentieel |
| Functies van de analoge ingangen |
General Purpose, Set Value Current, Set Value Velocity |
| DIP-switch |
6 |
| Functies van de DIP-schakelaars |
CAN Node-ID, Autobitrate, CAN-Bus Abschluss |
| Uitgangen |
| Digitale uitgangen |
4 |
| Functies van de digitale uitgangen |
Houdrem, general purpose |
| Analoge uitgangen |
1 |
| Resolutie, bereik |
12-bit, -4…+4 V |
| Functies van de analoge uitgangen |
General Purpose |
| Spanningsuitgangen |
| Voedingsspanning Hall-sensor |
zie "Voedingsspanning sensor |
| Voedingsspanning encoder |
zie "Voedingsspanning sensor |
| Voedingsspanning sensor |
+5 VDC, max. 100 mA |
| Secundaire hulpspanning |
+5 VDC, max. 145 mA |
| Interfaces |
| USB (Full Speed) |
ja |
| CAN |
Ja |
| CANopen |
Slave |
| CANopen application layer |
CiA 301 |
| CANopen frameworks |
CiA 305 |
| CANopen profiles motion control |
CiA 402 |
| Gateway-functie USB naar CAN |
ja |
| Indicatie |
| Statusindicatie "gereed" (ready) |
groene led |
| Statusindicatie "fout" (error) |
rode led |
| Veiligheidsfunctie |
| Veiligheidsfuncties |
Stroombegrenzing, overstroom, overtemperatuur, onderspanning, overspanning, spanningstransiënten, kortsluiting van de motorleiding, verlies van het feedbacksignaal |
| Omgevingsvereisten |
| Temperatuur – bedrijf (min.) |
-30 °C |
| Temperatuur – bedrijf (max.) |
45 °C |
| Temperatuur – vergroot bereik |
+45…+75 °C, Derating: -0.267 A/°C |
| Temperatuur – opslag (min.) |
-40 °C |
| Temperatuur – opslag (max.) |
85 °C |
| Luchtvochtigheid (niet condenserend) (min.) |
5 % |
| Luchtvochtigheid (niet condenserend) (max.) |
90 % |
| Mechanische gegevens |
| Gewicht |
24 g |
| Afmeting (lengte) |
60 mm |
| Afmeting (breedte) |
60 mm |
| Afmeting (hoogte) |
22 mm |
| Bevestiging |
Bevestigingsboringen voor schroeven M2 |
| Software |
| Installatieprogramma |
EPOS Setup |
| Graphical User Interface |
EPOS Studio |
| Besturingssysteem |
Windows 11, 10 |
| Windows-DLL voor pc |
32-/64-bit |
| Programmavoorbeelden |
MS Visual C#, MS Visual C++, MS Visual Basic, MS Visual Basic.NET, Borland C++, Borland Delphi, NI LabView, NI LabWindows/CVI |
| Linux Shared Object Library |
X86 32-/64-bit, ARMv6/v7/v8 32-bit, ARMv8 64-bit |
| CAN Interfaces |
IXXAT, Vector, National Instruments, Kvaser |
| Programmavoorbeeld |
C++ |
| Functies |
| CANopen Profile Position Mode |
Ja |
| CANopen Profile Velocity Mode |
Ja |
| CANopen Homing Mode |
Ja |
| CANopen Cyclic Synchronuous Position |
Ja |
| CANopen Cyclic Synchronuous Velocity |
Ja |
| CANopen Cyclic Synchronuous Torque |
Ja |
| Analoge instelling instelwaarde |
Ja |
| Position Control Feed Forward |
Ja |
| Velocity Control Feed Forward |
Ja |
| Dual Loop positie- en toerentalregeling |
Ja |
| Position Marker / Touch Probe |
Ja |
| Quickstop |
Ja |
| Vrijgave |
Ja |
| Besturing van houdrem |
Ja |
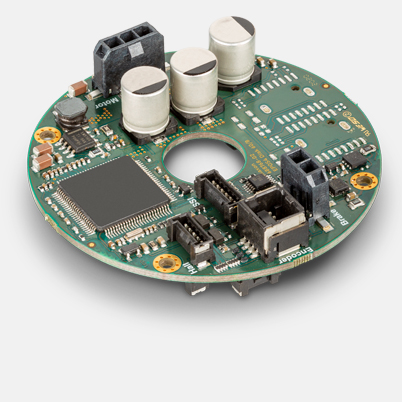
Beschrijving
De EPOS4 Disk 60/8 CAN is een dynamische, aansluitklare positioneerbesturing met een ronde vorm, met een opening in het midden voor de kabeldoorvoer en connectoren aan beide zijden. Geschikt voor de aansturing van een DC-motor met borstels en encoder of een borstelloze EC-motor (BLDC) met Hall-sensoren en encoder tot 480 W/1440 W.
Video's