
Kleine delta-robots.
Micromontage zorgt voor steeds grotere uitdagingen. Terwijl componenten en -systemen steeds kleiner worden, blijft de ontwikkeling van productiesystemen vaak achter. Een Zwitserse onderneming heeft een complete productfamilie revolutionaire Delta-robots op de markt gebracht. Sterke maxon motoren zorgen voor uiterst precieze en dynamische bewegingen.
Asyril heeft zich gespecialiseerd in de ontwikkeling en integratie van mechatronische systemen voor een snelle en automatische handling van kleine componenten, bijvoorbeeld uit de micro-, nano- en biotechnologie. In 2007 werd de onderneming opgericht door microrobotica-specialist dr. Alain Codourey en bouwt verder op de technologische knowhow van CSEM en de CPA groep. Het team vroeg zich af of het überhaupt technisch mogelijk was een microrobot van 100 x 100 x 100 mm³ te bouwen en hoe de kinetica van een dergelijke robot er in het ideale geval uit zou moeten zien. 10 jaar geleden stelden wetenschappers van CSEM (Swiss Center for Electronics and Microtechnology) reeds vast dat er een verschil bestaat tussen steeds kleiner wordende microcomponenten en gelijkblijvende productiesystemen. Terwijl de mechanische structuren van een robot relatief eenvoudig te minimaliseren zijn, geldt dat voor aandrijvingen in beperkte mate: „Bij conventionele systemen blijven de motoren in vergelijking tot de mechanica zeer groot. Daardoor blijkt ook de conventionele kinetica van bijvoorbeeld een flexibele arm robot ongeschikt omdat nog steeds grote motoren in de gewrichten worden ingebouwd”, legt dr. Alain Codourey uit.
Om hier een oplossing voor te vinden, ging Codourey samen met zijn onderzoeksteam van het CSEM en Bern University en op zoek naar systemen die meer geschikt zijn voor het gebruik in microtechnische componenten. „Uiteindelijk kwamen we tot de conclusie dat parallelle kinetische structuren het beste ons doel diende”, verklaart Codourey. Met dit in het achterhoofd werd eerst het idee van het parallelle kinetische assysteem geperfectioneerd. Om de massatraagheid zo laag mogelijk te houden, zijn alle componenten zo klein mogelijk en gewichtbesparend uitgevoerd. Een groot voordeel van de gekozen Delta-configuratie bestaat daaruit dat de maxon motoren weliswaar voor de beweging van de kinetica zorgen, maar zelf niet bewogen worden. In plaats daarvan zijn deze aan de steunarmen bevestigd en geven de beweging rechtstreeks door aan de structuur. Dit constructieprincipe werd in de complete productfamilie van Delta-robots toegepast: de modellen „Desktop Delta”, „Power Delta” en „Pocket Delta” zijn allemaal volgens hetzelfde principe opgebouwd.
Slimline aandrijftechnologie voor micromontage
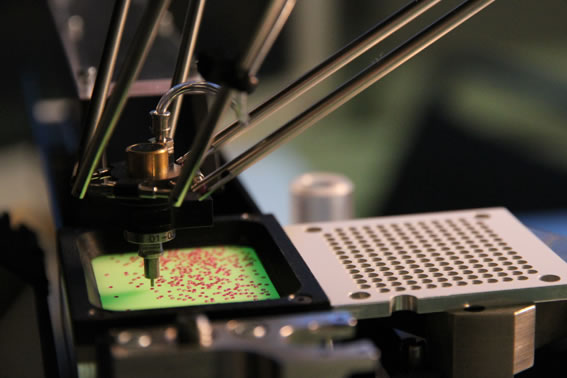
Maar niet alleen de mechanische componenten moesten kleiner – het formaat van de aandrijvingen werd tevens verkleind. In plaats van te grote motoren met een hoog vermogen en overeenkomstig grote warmteafgifte werden bij de Pocket Delta plaatsbesparende micromotoren van maxon toegepast. Het parallelle mechanisme van de robot wordt door drie EC i 40 motoren aangedreven die alle drie op een plaat boven de robot zijn bevestigd. Daardoor is de massa die bewogen wordt zeer klein en de robot zeer dynamisch. Voor een Pick-and-Place-cyclus heeft de Pocket Delta 0,33 s nodig en voert daardoor drie cycli per seconde uit. Door de grote stijfheid van de kinetische structuur heeft de robot een herhaal-precisie van minder dan 3 micrometer.
De borstelloze DC motoren hebben een diameter van slechts 40 mm en een vermogen van 50W. Opdat de Delta-robot niet alleen snel maar ook precies is, moet tevens de hoekpositie van de motor zeer nauwkeurig worden gemeten. Voor de positiebepaling worden de motoren daarom rechtstreeks verbonden met draaihoeksensors met hoge resolutie. Bovendien heeft elke motor een blokkeerrem die door Asyril zelf geconstrueerd werd. Dit zijn kleine pennen die met een veer de motorassen vasthouden. Wanneer de robot in werking is, worden deze door elektromagneten weggetrokken om de rem te ontgrendelen. De besturing van de robot is bovendien helemaal in de robot geïntegreerd en de communicatie wordt via een ethernet-interface gerealiseerd. De minirobot is zeer geschikt voor het snel verschuiven of samenvoegen van kleine componenten. In zijn categorie geldt hij als een van de snelste en meest precieze robots. De afmeting van deeltjes die verplaatst moeten worden, ligt over het algemeen tussen 0,5 en 15 millimeter. Door de gekozen constructie is er geen versnellingsmechanisme nodig.
De Pocket Delta-robot wordt in verschillende industrieën gebruikt. Vooral voor het sorteren, selecteren en bewerken van micro componenten (bijvoorbeeld schroeven, klinknagels, bouten of tandwielen) in de uurwerkindustrie. Maar ook in de medische techniek en in de elektronische- en halfgeleiderindustrie wordt de Pocket Delta ingezet.
Auteur: Anja Schütz, maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}